Intelligent Vision Systems Group
Active Projects
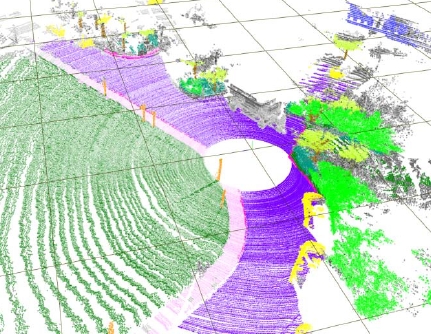
Object Detection and Tracking in 3D Laser Range Data
Modern 3D laser sensing devices easily produce massive datasets of up to now 1.3 million laser points per second. Current techniques are, therefore, not able to classify the data on-line. In this project, we address this problem and combine novel approaches from machine learning with feature-based object classification and tracking.
>more...![]()
Object and Person Tracking
Object tracking is an important task in many computer vision and robotic applications. It is especially difficult if not only the object but also the camera is mobile, as for tracking from a mobile robot. We are currently working on robust tracking methods which are based on a combination of feature saliencies and Particle filters. A special case is person tracking. It is necessary for mobile robots which have to follow a person as well as for robots which guide a person and which have to make sure that the guided person is still following. more...

CROP.SENSe.net: Derivation of 3D Plant Architectures
CROP.SENSe.net is an interdisciplinary network of researchers and stakeholders carrying out projects dedicated to developing and improving non-destructive sensor techniques to determine the internal and external characteristics of crops. The project features high throughput phenomics for quantifying morphological and physiological characteristics of crop varieties, deep phenotyping for determining metabolic processes, and precision farming to assist crop management and optimise resource use. Within this network subproject "Derivation of 3D Plant Architectures" is dealing with the automated structural 3D reconstruction of grapes on different scales and growing stages.
>more...
VOCUS: Visual Attention
Visual attention is the selection process in human vision which directs the gaze to the currently most interesting data. This might be regions which "pop out" of the image automatically, as in the picture on the right (bottom-up), or cues which are of current interest due to pre-knowledge about the target object or the scene (top-down).
more...
Simultaneous Localization And Mapping
Visual Simultaneous Localization And Mapping (SLAM) is the task of automatically creating a map of the environment from image data without knowing the current exact position of the camera. It is usually of interest for mobile robots but can also be applied to hand-held cameras. We developed a visual SLAM system which finds salient landmarks, tracks them over frames and redetects them when returning to a known position. Active camera control improves the system performance.
more...Completed Projects

ABIS: Automated Bee Identification System
ABIS stands for Automatic Bee Identification System. ABIS is designed to identify species of bees from images of their wings. Bees play a global key role in the ecosystem because they are the most important pollinating insects. This means that they are important both ecologically and economically. ABIS is the product of an interdisciplinary cooperation of the Institute of Computer Science III and the Institute of Agricultural Zoology and Bee Biology (now: Institute of Crop Science and Resource Conservation), both of Bonn University.
>more...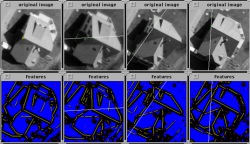
SMB: Semantic Modeling of Buildings
Fully automated reconstruction of buildings from digital images Role: Leader of the modeling group: modeling in 3D and 2D, aggretation in 3D, visualization, animation Methods: Hybrid Modeling (CSG/B-Rep), Aspect Graphs, Shape Grammars, Tecture Mapping
more...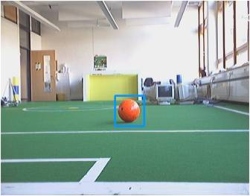
Object Recognition
We combined an AdaBoost based object classifier with the visual attention system VOCUS. This speeds up object recognition and reduces the number of false detections. In [Frintrop et al. IROS 2004] we applied this approach to data from a 3D laser scanner to recognize objects as chairs and robots. In [Mitri et al. ICRA 2005] we found different kinds of balls for robot soccer (RoboCup). While the classifier detects balls based on shape, the top-down attention could be easily trained from few training images to differently colored types of balls. This makes the system flexible.
For details see publication list.
VRA: Virtual Reality for Architecture
We employed virtual reality methods as well as acoustics simulation for the architectural design of a music school including a concert hall.
more...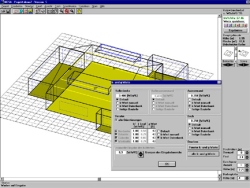
NESA: Low-Energy Solar Architecture
We employed methods of Geometric Modeling for modeling and evaluation of low-energy-solar-architecture. Thereby, we aimed for high usability, i.e. enabling architects and and homeowners by providing easy to understanding tools to model and evaluate the current or planned energy budged of their house. Partner: Buero of Low Energy Building Constrction, Dipl.-Ing. A. Lohr
more...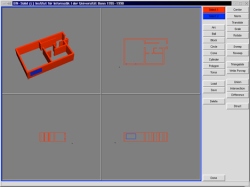
GWB: Geometric Workbench in 3D and 2D
We developed a hybrid geometric workbench by combining principles of Constructive Solid Geometry (CSG) with Boundary Representation (B-Rep) and Aspect Graphs. The Geometric Workbench was later used for the automated 3D reconstruction of buildings from aerial images within the bundle project "Semantic Modeling"
more...